
Last week was a big week for shape shifters. In Japan, researchers at Tohoku University and Japan Advanced Institute of Science and Technology announced that it had successful developed a shape-shifting molecular robot. The amoeba-like robot uses biomolecules, such as DNA and protein, to integrate molecular machines into an artificial cell membrane. In response to different DNA signals it then shifts shapes, like Terminator’s T-1000.
Head researcher, Shin-ichiro Nomura is aiming to have his molecular robot function inside a living cell. In his words, “that’s kind of a frontier,” having a robot implanted inside the nucleus of an organism to perform diagnostics and proactively fix cellular machinery. “It’s a little dreamy,” reflects Nomura. His amoeba-bot is already the size of less than one micrometer, small enough to fit in a human’s bloodstream.
Nomura’s system of molecular robotics is about the size and consistency of a living organism. It is a fluid-filled sac containing only biological and chemical components —currently 27 of them. The molecular components work in concert to stretch and change the shape of the sac, propelling it with cell-like motion through a fluid environment. The motion can be turned on and off with DNA signals that respond to light. It is curious to think if Nomura combined his molecular robots with the new liquid-metal technology coming out of RMIT University in Australia. The RIMT liquid metal was discovered last year and is currently being deployed in primitive machines.
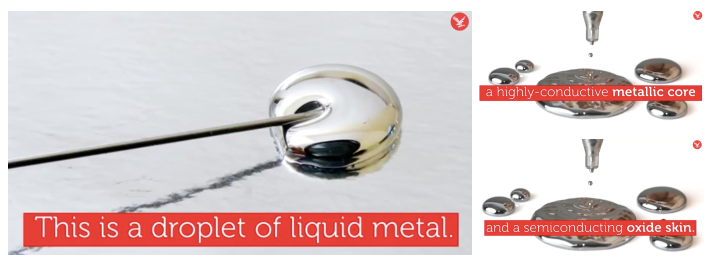
According to RIMT’s Professor Kourosh Kalantar-zadeh, “Using this discovery, we were able to create moving objects, switches and pumps that could operate autonomously – self-propelling liquid metals driven by the composition of the surrounding fluid. Eventually, using the fundamentals of this discovery, it may be possible to build a 3D liquid metal humanoid on demand – like the T-1000 Terminator.” (On second thought, maybe I won’t introduce them…)
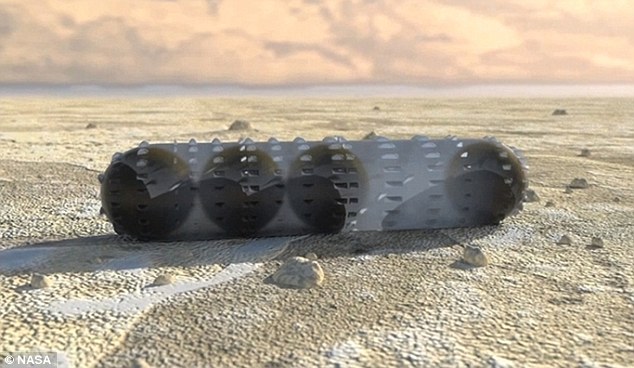
The idea of shape-shifting could also be deployed in the next generation of Mars rovers. NASA this week was granted a patent for, “Locomotion of amorphous surface robots.” The purpose of the above worm-like jelly robot is to increase mobility as recent rovers have been stuck in Mars dust, like a Buick Skylark in Alabama mud. Essentially (and described below in greater detail) the locomotion would be derived by shifting weight via fluid movements between compartments inside the rover and its air valves. The inside of the fluid sack would be filled with memory shape polymers, while the exterior would be covered in bumps to enable it to grip surfaces.
“Once deployed on a surface, conventional rovers are typically propelled along a surface,” according to the patent summary. “In particularly sandy or loamy soil environments such as the lunar or Martian surfaces, conventional propulsion devices may become fouled and stuck.”
Amorphous robots have the potential to overcome some of these problems, plus they could handle some of the sketchier terrain that would pose a significant risk to traditional rovers. “The presently disclosed robots change shape in the direction of intended travel to provide improved surface mobility along with enhanced protection from the elements,” the summary claims.
To quote the patent: “multiple locomotion techniques are proposed in the patent:
- Bladder Bot: This design involves a multi-stage process that makes use of a fluid-filled bladder with circulating high-viscosity fluid. Movement of the robot is not based on external moving parts, but rather is caused due to the propulsion of the contained fluid by an internal valve system. The Bladder Bot can be designed as an amoeba or with rotating fluid compartments.
- Inchworm Robot: This robot has a tube-like design. Locomotion occurs when internal ferro fluid moves through an electromagnetic ring. The motion resembles the way an inchworm moves.
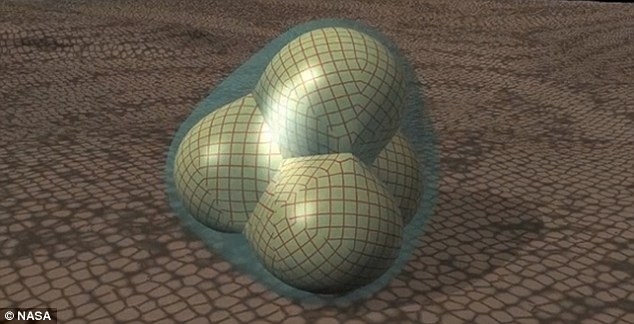
- Electromagnetic Sphere Robot: This design consists of multiple electromagnetic spheres inside a fluid-filled flexible bladder. Motion is initiated when the polarity of the electromagnets are altered sequentially to move the magnetic balls internally, which thus causes the robotic locomotion.
- Polymer Cell Robot: The polymer cell robot design consists of multiple polymeric cells encapsulated in a larger flexible outer shell. The cells individually either swell or contract, causing the center of gravity to change, and thus the object rolls accordingly.”
Last week, Congress passed a bill that requires NASA to work on sending humans to Mars by 2033 (it is unclear if humans are required to return home). These types of liquid robots offer amazing potential for interplanetary discoveries, especially if they can fold in origami techniques within a capsule to unfold on landing. In the meantime, there are also applications for this technology on Earth. According to NASA its, “amorphous robots are also useful in emergency and industrial activities, such as search and rescue (e.g., exploring rubble following an earthquake) and inspection of oil pipelines or sewage systems.”
Astute readers will recognize that this is the third post regarding shape-shifting robots. In the past many technologies have utilized origami folding techniques for deploying robots within the body and in microscopic external locations. However, this is the first time we are seeing robots with changing shapes similar to living cells, which brings up a pandora box of ethical concerns.
Professor of Cognitive Neuroscience and Director of the Sheffield Centre for Robotics at University of Sheffield, writes about the ethical dimensions of the potential of living robots, “these are not properties that we find in drills and screwdrivers. They are embryonic psychological capacities that, so far, have only been found in living, sentient entities such as humans and animals. Stories such as Westworld remind us that as we progress toward ever more sophisticated AI, we should consider that this path might lead us both to machines that are more like us, and to seeing ourselves as more like machines.”

{kind=link}